Navio2 Autopilot
The Navio2 Autopilot is designed both for your own custom robotic projects and as a platform for Linux version of APM (ArduPilot).
Navio2 eliminates the need for multiple on-board controllers making development easier and increasing robustness. It extends connectivity and allows control of all kinds of moving robots: cars, boats, multirotors, planes.
For accurate knowledge of position and orientation Navio2 is equipped with double IMU and GPS/Glonass/Beidou receiver. PWM, ADC, SBUS and PPM are integrated in Linux sysfs via the on-board RC I/O co-processor, allowing easy access from any programming language.
Features
- MS5611 Barometer (I2C1)
- MPU9250 9DOF IMU (SPI0)
- LSM9DS1 9DOF IMU (SPI0)
- Ublox M8N Glonass/GPS/Beidou (SPI0)
- 14 PWM servo outputs (RCIO/SPI1)
- PPM/S.Bus input (RCIO/SPI1)
- 6-channel ADC (RCIO/SPI1)
- Integrated RGB LED
- UART, I2C terminals for extensions
- Power module connector
- Triple redundant power supply
详情 | 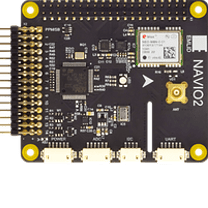 |